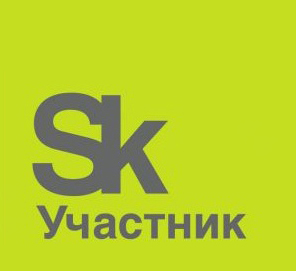
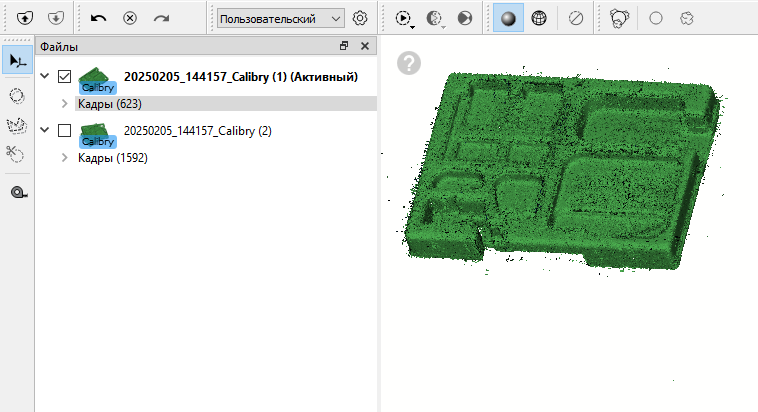
В процессе 3D-сканирования может возникнуть ситуация, когда результат сканирования распадается на несколько отдельных фрагментов. Это выглядит как несколько копий объекта, смещённых относительно друг друга:
Это может происходить по нескольким причинам, наиболее распространенные из которых:
-
Не активирован режим Live3D, создающий временную 3D-модель сканируемого объекта и позволяющий оценивать качество сканирования «на лету»;
-
В процессе сканирования был резкий рывок, повлёкший ошибку трекинга;
-
Низкое значение FPS (frames per second): малое количество захватываемых в секунду кадров связано либо с использованием низкопроизводительного компьютера, либо с выполнением на компьютере других ресурсоёмких задач — в этом случае, компьютер может не успевать обрабатывать и сохранять поток данных со сканера;
-
Недостаток выраженной геометрии при сканировании в геометрическом трекинге (плоские поверхности или поверхности с симметричными и повторяющимся элементами, например, прорези вентиляции, прутья ограждений, спицы колёс или лопасти пропеллера).
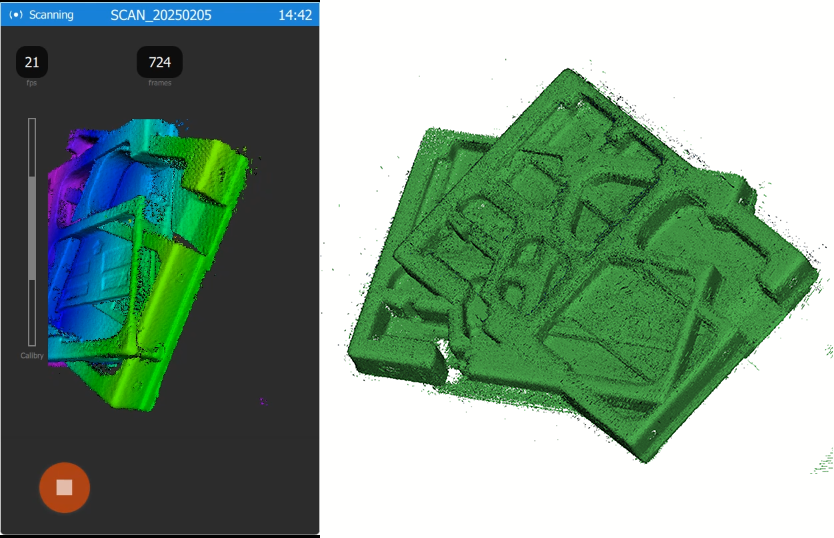
Чтобы избежать появления подобных расслоений, важно использовать быстродействующий компьютер, способный оперативно записывать поток данных, поступающий со сканера, а также адекватно выбирать как тип трекинга (геометрия/маркеры/текстура), так и траекторию сканирования, и не забывать активировать режим Live3D, упрощающий контроль сканирования.
Как правило, нет смысла продолжать сканирование, если произошло смещение сканируемого объекта или его элементов — в этом случае лучше остановить сканирование, скорректировать настройки или сканируемую сцену, и начать новый скан. Тем не менее, если смещение обнаружено уже после сканирования, при этом скан в целом содержит хорошие данные, либо если повторное сканирование невозможно, есть смысл попробовать отсечь лишние данные или разделить скан на несколько частей. В этой статье мы рассмотрим данный процесс в Calibry Nest 3.7.42.
В первую очередь, для любого скана необходимо запустить процесс регистрации, который является частью нормального процесса обработки: алгоритмы регистрации анализируют полученные в процессе сканирования кадры и выставляют их в оптимальное положение. В подавляющем большинстве случаев, это решает проблему расслоений и шума.
Этот процесс позволяет устранить большинство расслоений, видимых на необработанных сканах. Тем не менее, при значительных ошибках сканирования, возможны ситуации, когда алгоритм регистрации уже не в состоянии решить проблему.
В этом случае, часть данных скана можно удалить, однако под этим понимается не удаление данных с полного облака точек, а последовательное выделение кадров скана до момента расслоения. Рассмотрим пример.
Для поиска места возникновения расслоения, раскройте список кадров скана на панели проектов:
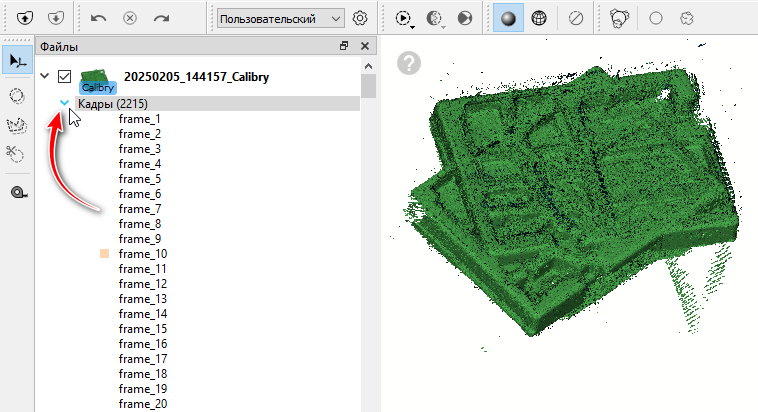
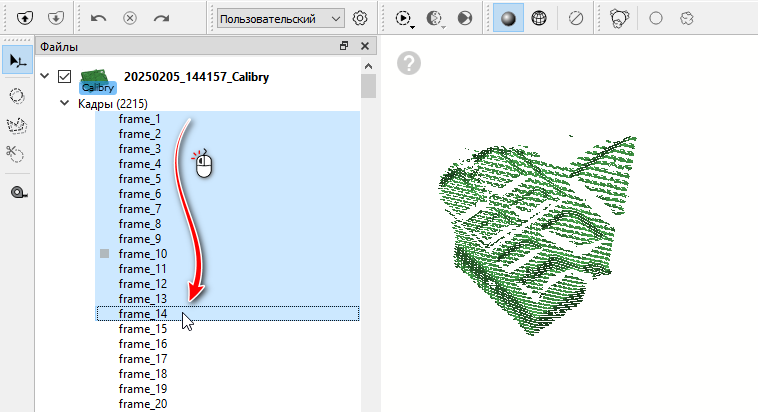
Каждый кадр данных содержит небольшую часть общего облака точек скана. Задача заключается в поиске первого кадра, выпадающего из общей последовательности. Начните выделять кадры и следите за пополнением облака точек в окне просмотра: по мере выделения кадров, облако будет становиться всё более плотным:
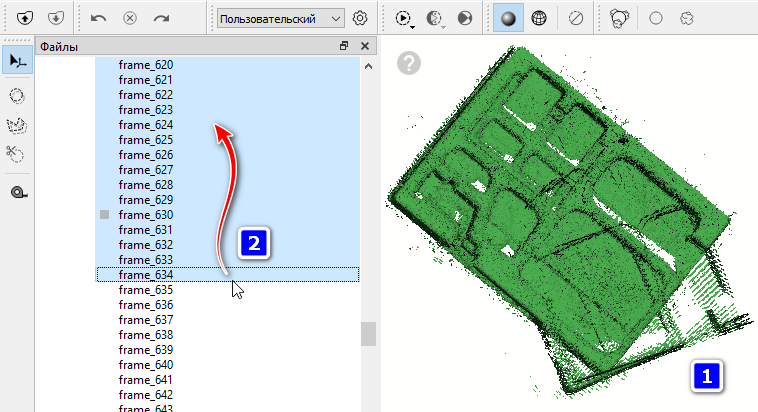
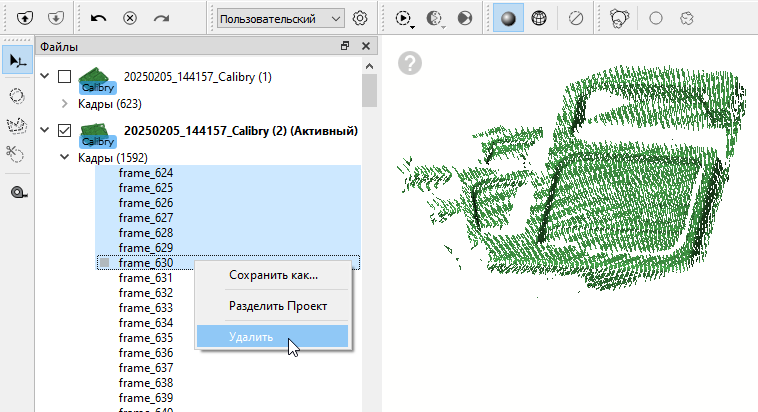
В момент, когда на облаке точек начнёт появляться контур второй копии объекта (1), вернитесь немного назад по списку кадров, до момента на котором расслоение ещё незаметно (2):
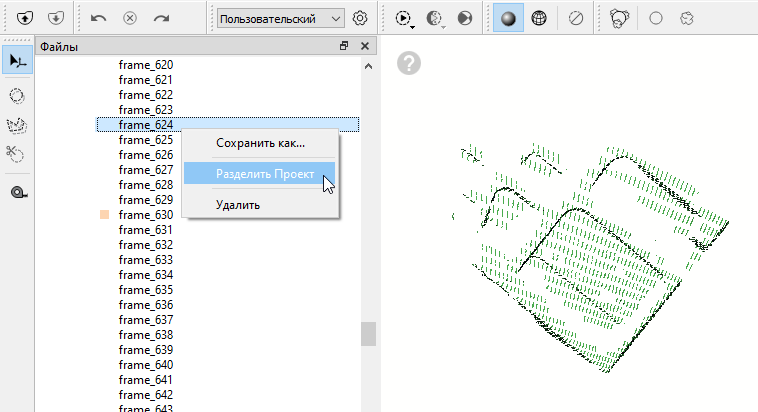
В этом месте скан можно разделить на два. Выделите кадр для разделения и выберите в контекстном меню «Разделить Проект»:
После этого в списке сканов появится два отдельных фрагмента, которые можно обрабатывать и сохранять независимо друг от друга как отдельные сканы:
Иногда, после разбиения скана, в одном из фрагментов может остаться несколько выбивающихся кадров, которые можно просто удалить:
Аналогичным образом, можно удалить часть кадров в конце скана, если срыв трекинга произошёл в конце сканирования и сканирование было остановлено.
При дальнейшей обработке, данные фрагменты разделённых сканов можно использовать как фрагменты для сборки финальной модели вместе с остальными сканами этого же объекта.